Робот
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| РОА |
| РОБ |
| РОВ |
| РОГ |
| РОД |
| РОЕ |
| РОЖ |
| РОЗ |
| РОЙ |
| РОК |
| РОЛ |
| РОМ |
| РОН |
| РОО |
| РОП |
| РОР |
| РОС |
| РОТ |
| РОУ |
| РОХ |
| РОЧ |
| РОШ |
| РОЩ |
| РОЭ |
| РОЮ |
| РОЯ |
Робот (чеш. robot, от robota — подневольный труд, rob — раб), машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром. Термин «робот» был впервые введён К. Чапеком в пьесе «R. U. R.» (1920), где Робот называли механических людей. С развитием робототехники определились 3 разновидности Робот: с жёсткой программой действий; управляемые человеком-оператором; с искусственным интеллектом (иногда называемые интегральными), действующие целенаправленно («разумно») без вмешательства человека. Большинство современных Робот (всех трёх разновидностей) — Робот-манипуляторы (см. Манипулятор), хотя существуют и другие виды Робот (например, информационные, шагающие и т. п.). Возможно объединение Робот первой и второй разновидностей в одной машине с разделением времени их функционирования. Допустима также совместная работа человека с Робот третьего вида (в так называемом супервизорном режиме). Первые Робот (андроиды, имитировавшие движения и внешний облик человека) использовались преимущественно в развлекательных целях (см. Автомат). С 30-х гг. в связи с автоматизацией производства Робот-автоматы стали применять в промышленности наряду с традиционными средствами автоматизации технологических процессов, в частности в мелкосерийном производстве и особенно в цехах с вредными условиями труда (рис. 1).
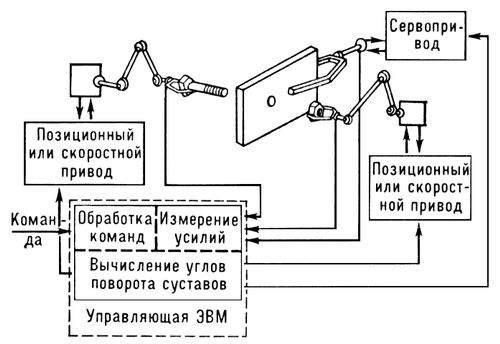
Рис. 1. Схема сборки механического узла роботом-манипулятором.
Промышленный Робот-манипулятор имеет «механическую руку» (одну или несколько) и вынесенный пульт управления или встроенное устройство программного управления, реже ЭВМ. Он может, например, перемещать детали массой до нескольких десятков кг в радиусе действия его «механических рук» (до 2 м), выполняя от 200 до 1000 перемещений в час. Промышленные Робот-автоматы имеют преимущество перед человеком в скорости и точности выполнения ручных однообразных операций. Наиболее распространены Робот-манипуляторы с дистанционным управлением и «механической рукой», закрепленной на подвижном или неподвижном основании. Оператор управляет движением «руки», одновременно наблюдая её непосредственно либо на телевизионном экране; в последнем случае. Робот снабжается «телевизионным глазом» — передающей телевизионной камерой (рис. 2а). Часто Робот оснащают обучающейся автоматической системой управления. Если такому Робот «показывают» последовательность операций, то система управления фиксирует сё в виде программы управления и затем точно воспроизводит при работе. Робот-манипуляторы используют для работы в условиях относительной недоступности (рис. 2б) либо в опасных, вредных для человека условиях, например в атомной промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные Робот-манипуляторы разнообразных конструкций и назначения: от глубоководных управляемых аппаратов с «механическими руками» (в частности, для захвата образцов породы со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской аппаратурой до подводных бульдозеров и буровых установок.
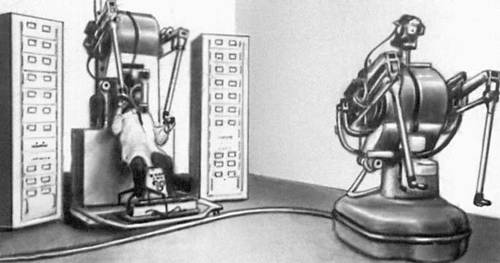
Рис. 2. Робот-манипулятор с дистанционным управлением «Маскот» (Италия) для работы с радиоактивными веществами.
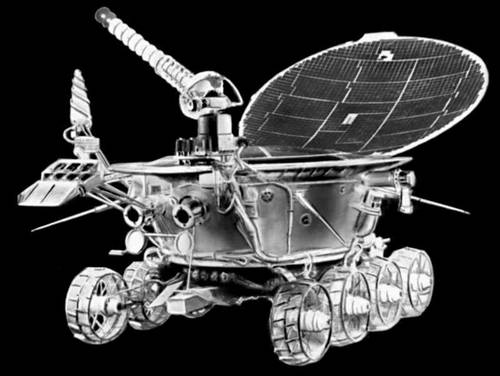
Рис. 2. Лунный самоходный аппарат «Луноход-1» (СССР), управляемый по радио с Земли (б).
В конце 60-х гг. в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных Робот Такие Робот (рис. 3) имеют датчики очувствления (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) — специализированную ЭВМ с набором программ — и исполнительные механизмы (моторную систему). Действия интеллектуального Робот обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий Робот, которые реализуются исполнительными механизмами. К 1975 интеллектуальные Робот находились в стадии научных разработок и попыток использования их в промышленности.
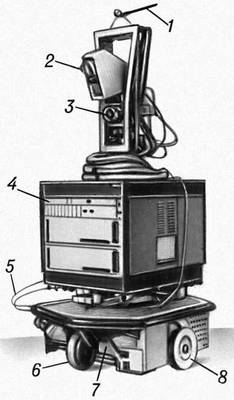
Рис. 3. Интеллектуальный робот — автоматический самоходный аппарат (США); обмен информацией с ЭВМ осуществляется по радио: 1 — антенна; 2 — дальномер; 3 — телевизионная камера; 4 — блок управления телевизионной камерой; 5 — датчик очувствления; 6 — рулевое колесо; 7 — приводной двигатель; 8 — ведущие колёса.
Лит.: Человеческие способности машин, пер. с англ., М., 1971; Кобринский А. Е., Вот они — роботы, М., 1972; Теория и устройство манипуляторов. Сб. ст., М., 1973; Интегральные роботы, пер. с англ., М., 1973; Попов Е. П., Роботы-манипуляторы, М., 1974.
Л. Н. Столяров.
|
Так же Вы можете узнать о... Кросс телеграфный, помещение внутри телеграфного предприятия, в котором сосредоточиваются вводы и защита всех проводных линий и кабелей связи, устанавливаются центральный линейный телеграфный коммутатор и столы с испытательной аппаратурой. Мирмекодия (Myrmecodia), род растений семейства мареновых. Партизану Отечественной войны «» медаль, см. в ст. Розмарин (раст. сем. губоцветных) Розмарин (Rosmarinus), род растений семейства губоцветных. Сусук гангский, слепой дельфин, сузу (Platanista gangetica), водное млекопитающее семейства речных дельфинов подотряда зубатых китов. Хайрил Анвар (Chairil Anwar) (26.7.1922, Медан, — 28. Яп (глубоководный жёлоб в Тихом ок.) Яп, глубоководный жёлоб вдоль восточного подножия островной дуги Яп и Нгулу в Тихом океане. Близняк Евгений Варфоломеевич [28.3(9.4).1881, Мстиславль, — 23. Гиацинтик (Hyacinthella), род многолетних луковичных растений семейства лилейных. Заставка, небольшая орнаментальная или изобразительная (иногда сюжетная) композиция (в ширину наборной полосы или уже), выделяющая и украшающая начало какого-либо раздела как рукописной, так и печатной книги или журнала. Комодский варан, гигантский варан (Varanus komodoensis), крупнейший представитель не только варанов, но и всех современных ящериц. Мария Стюарт (Mary Stuart) (7 или 8.12.1542, Линлитгоу, Шотландия, — 8. Октант (созвездие) Октант (лат. Octans), околополярное созвездие Южного полушария неба, наиболее яркая звезда 3,8 визуальной звёздной величины. Пушонка, гашёная известь, кальция гидроокись, Ca (OH)2. Сорт растений (франц. sorte, от лат. sors — разновидность, вид), культивар, совокупность растений, созданная в результате селекции и обладающая определёнными, передающимися по наследству морфологическими, физиологическими, хозяйственными признаками и свойствами; низшая классификационная единица для культурных растений. |
|