Управления система с переменной структурой
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| УПА |
| УПД |
| УПЕ |
| УПИ |
| УПК |
| УПЛ |
| УПО |
| УПР |
| УПС |
| УПТ |
| УПУ |
| УПЫ |
Управления система с переменной структурой (СПС), нелинейная система автоматического управления, состоящая из совокупности непрерывных подсистем (называемых структурами) с определённым правилом перехода в процессе функционирования от одной структуры данной совокупности к другой. В СПС устройство управления содержит ключевые элементы, которые разрывают или восстанавливают связи между функциональными элементами системы, изменяя тем самым каналы передачи воздействий и обеспечивая переход от одной структуры системы к другой (рис. 1). Такой принцип построения устройства управления существенно расширяет возможности управления вследствие использования полезных свойств каждой из структур и, кроме того, позволяет получить новые свойства, не присущие ни одной из них.
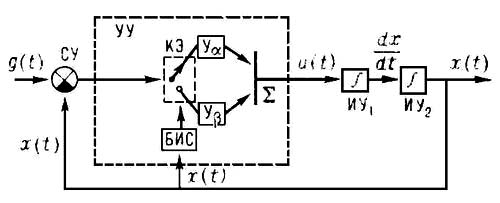
Рис. 1. Функциональная схема системы управления с переменной структурой: УУ — устройство управления; СУ — сравнивающее устройство; КЭ — ключевой элемент; БИС — блок изменения структуры; ∑ — сумматор; Уa — усилитель с коэффициентом передачи a; Уb — усилитель с коэффициентом передачи b; ИУ — интегрирующие устройства; g(t) — задающее воздействие; u(t) — управляющее воздействие; x(t) — управляемая величина.
Особенности СПС можно пояснить на примере простейшей системы автоматического управления (САУ), поведение (движение) которой описывается дифференциальным уравнением
 , (1)
, (1)
где х – управляемая величина, u – управляющее воздействие, t – время. Пусть в САУ (1) возможна реализация лишь положительной (u = bx, b = const > 0) и отрицательной (u = – aх, a = const > 0) обратной связи (a и b – коэффициент передачи цепи обратной связи). При положительной обратной связи движение САУ описывается уравнением  : (структура I), а при отрицательной
: (структура I), а при отрицательной  (структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
(структура II). Для наглядного представления поведения (движения) САУ строят её фазовые портреты (см. Фазовой плоскости метод) для структуры I (рис. 2, а) и структуры II (рис. 2, б).
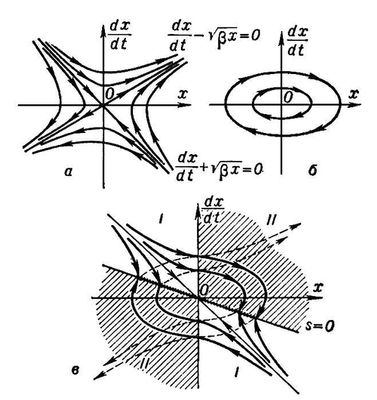
Рис. 2. Фазовые портреты систем автоматического управления: а — с положительной обратной связью (структура I); б — с отрицательной обратной связью (структура II); в — с переменной структурой; I — область движения системы со структурой I; II — область движения системы со структурой II; 0 — начало координат; x — управляемая величина; t — время.
Задача состоит в том, что требуется выбрать такое управление и из класса возможных управлений, при котором система обладает асимптотической устойчивостью. Из анализа фазовых портретов системы следует, что ни положительная, ни отрицательная обратная связь порознь не решает поставленной задачи. Поэтому в соответствии с методами СПС реализуют следующее правило изменения структур:
(2)
 , c = const, 0 < c <
, c = const, 0 < c <  .
.
Фазовый портрет такой системы изображен на рис. 2, б; из анализа портрета следует, что изображающая точка из произвольного начального положения попадает на прямую s= 0, проходящую через начало координат, в окрестности которой фазовые траектории направлены навстречу друг другу и, следовательно, изображающая точка не может покинуть эту прямую. Траектория s = 0 не принадлежит ни одной из структур (I или II), поэтому, согласно (2), за счёт переключения управления и в системе происходит смена структур теоретически с бесконечной частотой. Такой режим движения называется скользящим, а за уравнение движения принимается уравнение прямой s = 0:
 , c > 0. (3)
, c > 0. (3)
Все решения уравнения (3) стремятся к нулю при t®¥, т. е. поставленная задача решена. Существенно, что движение системы в скользящем режиме не зависит от характеристик объекта управления и коэффициент обратной связи, качество переходного процесса определяется только выбором параметра с.
Рассмотренный пример показывает, что посредством сочетания неприемлемых порознь структур и за счёт использования скользящих режимов можно синтезировать СПС, обладающие рядом положительных свойств, в частности апериодической устойчивостью и параметрической инвариантностью. С помощью СПС решается широкий круг задач теории управления, например задачи высококачественного воспроизведения задающего воздействия при инвариантности к параметрическим и внешним возмущениям, многосвязного регулирования, оптимизации и др.
Лит.: Емельянов С. В., Системы автоматического управления с переменной структурой, М., 1967; Системы с переменной структурой и их применение в задачах автоматизации полёта, М., 1968; Теория систем с переменной структурой, М., 1970; Уткин В. И., Скользящие режимы и их применения в системах с переменной структурой, М., 1974.
Б. З. Голембо, С. К. Коровин.
|
Так же Вы можете узнать о... Предмет учебный, дисциплина учебная, дидактически обоснованная система знаний, умений и навыков, отобранных из соответствующей отрасли науки, техники, искусства, производственной деятельности и др. Синхронная вычислительная машина, ЦВМ, в которой моменты начала и конца выполнения операций задаются устройством управления. Тукарам (1608, Деху, близ г. Пуна, Махараштра, — 1649), индийский поэт-вишнуит. Чума животных, группа инфекционных болезней, характеризующихся острым течением, разнообразием клинических признаков, высокой летальностью (70—100%). Апаран, посёлок городского типа, центр ского района Армянской ССР. Венский кружок, философский кружок, в котором были разработаны основы логического позитивизма, сложился (в 1922) вокруг австрийского физика М. Датские лошади, породы лошадей, выведенные в Дании, — ютландская и фредериксборгская. Йемен (Нар. Демократич. Республика Йемен) Йемен, Народная Демократическая Республика Йемен (Джумхурият аль-Йаман ад-Димократия аш-Шаабия), НДРЙ, государство в Азии, на Ю. Кулачество (рус. термин от слова «кулак», первоначально синоним к словам «выжига», «мироед», обозначал человека, наживавшегося грабительской эксплуатацией, ростовщичеством и спекуляцией; с 1890-х использовался для обозначения формирующейся буржуазии деревни), деревенская буржуазия. Мобил (город в США) Мобил (Mobile), город и порт на Ю. США, в штате Алабама, на берегу бухты Мобил (при впадении р. Патрици Франческо Патрици (Patrizi, Patrizzi) Франческо (1529, Керсо, — февраль 1597, Рим), итальянский гуманист и философ, представитель неоплатонизма эпохи Возрождения. Роман (город в Румынии) Роман (Roman), город на северо-востоке Румынии, на р. Сура (река) Сура, река в Ульяновской и Пензенской областях, Мордовской АССР, Чувашской АССР и Мордовской АССР и Горьковской области РСФСР, правый приток Волги. Фуникулюс, то же, что семяножка. Яванский язык, язык населения Центральной и Восточной Явы и некоторых районов северного побережья Западной Явы. Бётман-Гольвег Теобальд Бетман-Гольвег (Bethmann Hollweg) Теобальд (29. Гематоген (от гемато... и греч.... genes — рождающий, рожденный), лекарственный препарат, изготовляемый из дефибринированной крови убойного скота с добавлением сахарного сиропа и этилового спирта. Жидкое стекло, водный раствор силиката натрия или калия; см. Ковалентная связь, один из видов химической связи между двумя атомами, которая осуществляется общей для них электронной парой (по одному электрону от каждого атома). |
|