Фотограмметрия
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| ФОБ |
| ФОВ |
| ФОГ |
| ФОД |
| ФОЙ |
| ФОК |
| ФОЛ |
| ФОМ |
| ФОН |
| ФОР |
| ФОС |
| ФОТ |
| ФОФ |
| ФОХ |
| ФОШ |
Фотограмметрия (от фото..., греч. grámma – запись, изображение и ...метрия), научно-техническая дисциплина, занимающаяся определением размеров, формы и положения объектов по их изображениям на фотоснимках. Последние получают как непосредственно кадровыми, щелевыми и панорамными фотоаппаратами, так и при помощи радиолокационных, телевизионных, инфракрасных-тепловых и лазерных систем (см. Аэрометоды). Наибольшее применение, особенно в аэрофотосъёмке, имеют снимки, получаемые кадровыми фотоаппаратами. В теории Фотограмметрия такие снимки считаются центральной проекцией объекта. Уклонения от центральной проекции, вызванные дисторсией объектива, деформацией фотоматериала и др. источниками ошибок, учитываются по данным калибровки аэрофотоаппарата и снимков. В Фотограмметрия используются одиночные снимки и стереоскопические их пары. Эти стереопары позволяют получить стереомодель объекта. Раздел Фотограмметрия, изучающий объекты по стереопарам, называется стереофотограмметрией.
Положение снимка в момент фотографирования определяют три элемента внутреннего ориентирования – фокусное расстояние фотокамеры f, координаты x0, y0 главной точки о (рис. 1) и шесть элементов внешнего ориентирования – координаты центра проекции S – XS, YS, ZS, продольный и поперечный углы наклона снимка a и w и угол поворота c.
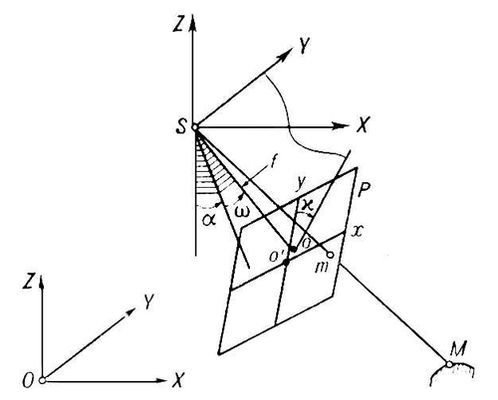
Рис. 1. к ст. Фотограмметрия.
Между координатами точки объекта и её изображения на снимке существует связь:  , (1)
, (1)
где X, Y, Z и XS, YS, ZS – координаты точек М и S в системе OXYZ; X’, Y’, Z’ – координаты точки m в системе SXYZ, параллельной OXYZ, вычисляемые по плоским координатам х и у:  . (2)
. (2)
Здесь a1= cos acosc sinasinwsinc a2= - cosasinc sinasin wcosc a3 = - sinacos w b1= coswsinc b2= coswcosc (3) b3 = -sinw c1= sinacosc + cosasinwsinc, c2 = sinacosc + cosasinwcosc, c3 = cosacosw
Формулы связи между координатами точки М объекта (рис. 2) и координатами её изображений m1 и m2 на стереопаре P1 – P2 имеют вид:  , (4)
, (4)
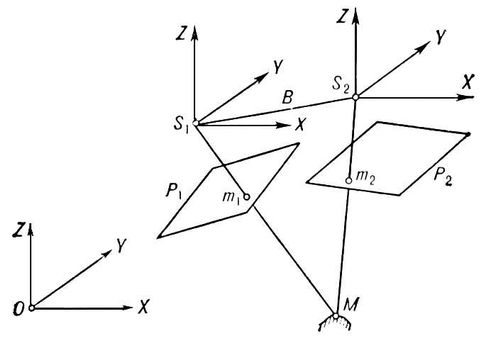
Рис. 2. к ст. Фотограмметрия.
где  , (5)
, (5)
BX, BY и BZ – проекции базиса В на оси координат. Если элементы внешнего ориентирования стереопары известны, то координаты точки объекта можно определить по формуле (4) (метод прямой засечки). По одиночному снимку положение точки объекта можно найти в частном случае, когда объект плоский, например равнинная местность (Z = const). Координаты х и у точек снимков измеряются на монокомпараторе или стереокомпараторе. Элементы внутреннего ориентирования известны из результатов калибровки фотоаппарата, а элементы внешнего ориентирования можно определить при фотографировании объекта или в процессе фототриангуляции. Если элементы внешнего ориентирования снимков неизвестны, то координаты точки объекта находят с использованием опорных точек (метод обратной засечки). Опорная точка – опознанная на снимке контурная точка объекта, координаты которой получены в результате геодезических измерений или из фототриангуляции. Применяя обратную засечку, сначала определяют элементы взаимного ориентирования снимков P1 – P2 (рис. 3) – a’1, c'1, a’2, w’2, c’2 в системе S1X’Y’Z’; ось Х которой совпадает с базисом, а ось Z лежит в главной базисной плоскости S1O1S2 снимка P1. Затем вычисляют координаты точек модели в той же системе. Наконец, используя опорные точки, переходят. от координат точек модели к координатам точек объекта.

Рис. 3. к ст. Фотограмметрия.
Элементы взаимного ориентирования позволяют установить снимки в то положение относительно друг друга, которое они занимали при фотографировании объекта. В этом случае каждая пара соответственных лучей, например S1m1 и S2m2, пересекается и образует точку (m) модели. Совокупность лучей, принадлежащих снимку, называется связкой, а центр проекции – S1 или S2 – вершиной связки. Масштаб модели остаётся неизвестным, т.к. расстояние S1S2 между вершинами связок выбирается произвольно. Соответственные точки стереопары m1 и m2 находятся в одной плоскости, проходящей через базис S1S2. Поэтому  (6)
(6)
Полагая, что приближённые значения элементов взаимного ориентирования известны, можно представить уравнение (6) в линейном виде: ada1’ + bda2’ + сdw2’ + ddc1’ + edc2’ + l = V, (7)
где da1’,... edm2’ – поправки к приближённым значениям неизвестных, а,..., е – частные производные от функции (6) по переменным a1’,...c2’, l – значение функции (6), вычисленное по приближённым значениям неизвестных. Для определения элементов взаимного ориентирования измеряют координаты не менее пяти точек стереопары, а затем составляют уравнения (7) и решают их способом последовательных приближений. Координаты точек модели вычисляют по формулам (4), выбрав произвольно длину базиса В и полагая Xs1 = Ys1 = Zs1 = 0, BX= В, BY= BZ = 0. При этом пространственные координаты точек m1 и m2 находят по формулам (2), а направляющие косинусы – по формулам (3): для снимка P1 по элементам a1’, w1’ = 0, c1’, а для снимка P2 по элементам a2’, w2’, c2’.
По координатам X’ Y’ Z’ точки модели определяют координаты точки объекта:  , (8)
, (8)
где t – знаменатель масштаба модели. Направляющие косинусы получают по формулам (3), подставляя вместо углов a, w и c продольный угол наклона модели x, поперечный угол наклона модели h и угол поворота модели q.
Для определения семи элементов внешнего ориентирования модели –  ,
,  ,
,  , x, h, q, t – составляют уравнения (8) для трёх или более опорных точек и решают их. Координаты опорных точек находят геодезическими способами или методом фототриангуляции. Совокупность точек объекта, координаты которых известны, образует цифровую модель объекта, служащую для составления карты и решения различных инженерных задач, например для изыскания оптимальной трассы дороги. Кроме аналитических методов обработки снимков, применяются аналоговые, основанные на использовании фотограмметрических приборов – фототрансформатора, стереографа, стереопроектора и др.
, x, h, q, t – составляют уравнения (8) для трёх или более опорных точек и решают их. Координаты опорных точек находят геодезическими способами или методом фототриангуляции. Совокупность точек объекта, координаты которых известны, образует цифровую модель объекта, служащую для составления карты и решения различных инженерных задач, например для изыскания оптимальной трассы дороги. Кроме аналитических методов обработки снимков, применяются аналоговые, основанные на использовании фотограмметрических приборов – фототрансформатора, стереографа, стереопроектора и др.
Щелевые и панорамные фотоснимки, а также снимки, полученные с применением радиолокационных, телевизионных, инфракрасных-тепловых и других съёмочных систем, существенно расширяют возможности Фотограмметрия, особенно при космических исследованиях. Но они не имеют единого центра проекции, и элементы внешнего ориентирования их непрерывно изменяются в процессе построения изображения, что осложняет использование таких снимков для измерительных целей.
Основные достоинства фотограмметрических методов работ: большая производительность, т.к. измеряются не объекты, а их изображения; высокая точность благодаря применению точных аппаратов и инструментов для получения и измерения снимков, а также строгих способов обработки результатов измерений; возможность изучения как неподвижных, так и движущихся объектов; полная объективность результатов измерений; измерения выполняются дистанционным методом, что имеет особое значение в условиях, когда объекты недоступны (летящий самолёт или снаряд) или когда пребывание в зоне объекта небезопасно для человека (действующий вулкан, ядерный взрыв). Фотограмметрия широко применяется для создания карт Земли, других планет и Луны, измерения геологических элементов залегания пород и документации горных выработок, изучения движения ледников и динамики таяния снежного покрова, определения лесотаксационных характеристик, исследования эрозии почв и наблюдения за изменениями растительного покрова, изучения морских волнений и течений и выполнения подводных съёмок, изысканий, проектирования, возведения и эксплуатации инженерных сооружений, наблюдения за состоянием архитектурных ансамблей, зданий и памятников, определения в военном деле координат огневых позиций и целей и др.
Лит.: Бобир Н. Я., Лобанов А. Н., Федорук Г. Д., Фотограмметрия, М., 1974; Дробышев Фотограмметрия В., Основы аэрофотосъемки и фотограмметрии, 3 изд., М., 1973; Коншин М. Д., Аэрофотограмметрия, М., 1967; Лобанов А. Н., Аэрофототопография, М., 1971; его же, Фототопография, 3 изд., М., 1968; Дейнеко В. Фотограмметрия, Аэрофотогеодезия, М., 1968; Соколова Н. А., Технология крупномасштабных аэротопографических съемок, М., 1973; Русинов М. М., Инженерная фотограмметрия, М., 1966; Rüger W., Buchholtz A., Photogrammetrie, 3 Aufl, B., 1973; Manual of photogrammetry, v. 1–2, Menasha, 1966; Bonneval Н., Photogrammétrie générate, t. 1–4, P., 1972; Piasecki М. B., Fotogrametria, 3 wyd., Warsz., 1973.
А. Н. Лобанов.
|
Так же Вы можете узнать о... Ферреро Гульельмо Ферреро (Ferrero) Гульельмо (21.7.1871, Портичи, – 3. Астрофизический институт Академии наук Казахской ССР, научно-исследовательское учреждение в Алма-Ате. Дайм (dime), серебряная монета США, равная 1/10 доллара, или 10 центам. Коссинна Густав Коссинна (Kossinna) Густав (28.9.1858, Тильзит, — 20. Ода (жанр поэзии и музыки) Ода (от греч. ōdē — песня), жанр лирической поэзии и музыки. Сименс Эрнст Вернер Сименс (Siemens) Эрнст Вернер (13.12.1816, Ленте, близ Ганновера, — 6. Цецидии, патологические новообразования на органах растений; то же, что галлы. Болонь (озеро в Хабаровском крае) Болонь, Болен, Нури-Оджал, Боулен-Оджал, озеро в Хабаровском крае РСФСР. Ёж-рыба (Diodon hystryx), рыба семейства двузубых отряда сростночелюстных. Ливистона (Livistona), род пальм. Стволы высотой до 30 м, диаметром 30—50 см, в верхней части покрыты волокнистыми остатками листовых влагалищ. Петров Александр Михайлович [1882, Казань,— 24. Субконтроктава (от суб... и контроктава), самая низкая из применяемых в музыке октав. Экстернат, установленный порядок сдачи экзаменов за курс учебного заведения для лиц, не обучавшихся в нём (экстернов). Вирхов Рудольф Вирхов (Virchow) Рудольф (13.10.1821, Шифельбейн, — 5. Искендеров Адиль Рза оглы (р. 10.3.1912, Гянджа, ныне Кировабад), советский режиссёр, актёр, народный артист СССР (1959). Мезон-Карре (Maison-Carrеe), прежнее название г. Протонема (от прото... и греч. nema — нить), предросток, часть гаметофита, развивающаяся у мхов из спор (первичная П. |
|