Инерциальная навигационная система
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| ИНА |
| ИНБ |
| ИНВ |
| ИНГ |
| ИНД |
| ИНЕ |
| ИНЁ |
| ИНЖ |
| ИНЗ |
| ИНИ |
| ИНК |
| ИНН |
| ИНО |
| ИНС |
| ИНТ |
| ИНУ |
| ИНФ |
| ИНХ |
| ИНЦ |
| ИНЧ |
| ИНЪ |
| ИНЫ |
| ИНЬ |
| ИНЮ |
| ИНЯ |
Инерциальная навигационная система, система инерциальной навигации, навигационное устройство, в основу работы которого положены классические (ньютоновские) законы механики. В Инерциальная навигационная система исходной (главной) системой отсчёта, по отношению к которой производятся инерциальные измерения, служит инерциальная (абсолютная, т. е. неподвижная относительно звёзд) система. Посредством Инерциальная навигационная система определяют координаты, скорость, ускорение и др. основные параметры движения объекта (самолёта, ракеты, космического корабля, надводных и подводных судов и др.). Инерциальная навигационная система имеют перед другими навигационными системами (см. Радионавигационная система) большие и важные преимущества — универсальность применения, возможность определения основных параметров движения, автономность действия, абсолютную помехозащищенность. Эти качества определили Инерциальная навигационная система как наиболее перспективную навигационную систему.
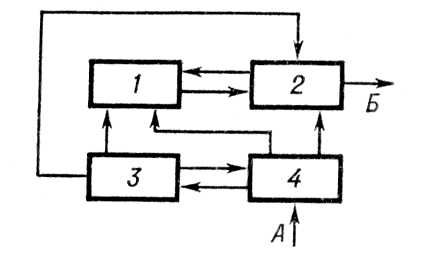
Блок-схема инерциальной навигационной системы: 1 — блок инерциальных измерителей и построителей направлений в пространстве (акселерометры и гироскопические устройства), посредством которого реализуется заданная ориентация измерительных осей и с которого выдаётся измерительная информация в вычислитель; 2 — вычислительный блок, в котором осуществляются интегрирование основного уравнения, вычисление необходимых параметров движения, формирование сигналов (в некоторых инерциальных навигационных системах) управления ориентацией инерциальных измерителей и сигналов компенсации систематических погрешностей (ускорения тяготения, поворотного ускорения, от несферичности Земли и др.); 3 — блок времени, из которого в блоки 1, 2, 4 поступают сигналы мирового времени; 4 — блок ввода начальной информации в блоки 1 и 2 для ориентации инерциальных измерителей и интегрирования основного уравнения; А — поступление начальной информации; Б — выдача конечной информации о параметрах движения. Стрелками показаны направления поступления информации.
Принцип действия Инерциальная навигационная система состоит в моделировании (представлении) поступательного движения объекта, характеризуемого изменением во времени ускорения, скорости и координат, подобным процессом движения воспринимающего элемента (массы) пространственного (трёхкомпонентного) акселерометра (в общем случае с компенсацией гравитационного ускорения). Уравнение движения воспринимающего элемента в инерциальной системе координат является основным уравнением инерциального метода определения параметров движения; в общем случае имеет вид: 
где  — ускорение, измеряемое акселерометром;
— ускорение, измеряемое акселерометром;  — радиус-вектор точки М (центра тяжести воспринимающего элемента) в инерциальной системе координат;
— радиус-вектор точки М (центра тяжести воспринимающего элемента) в инерциальной системе координат;  — сила притяжения единицы массы воспринимающего элемента в точке М (ускорение тяготения).
— сила притяжения единицы массы воспринимающего элемента в точке М (ускорение тяготения).
Сущность инерциального метода (рис.) состоит в измерении акселерометром исходного параметра (ускорения) и интегрировании основного уравнения: одинарном — для определения скорости, двойном — для определения координат. Ориентирование измерительных осей акселерометров по заданным направлениям производится свободными или управляемыми (по сигналам от акселерометров) гироскопическими устройствами (гироскопом, гиростабилизатором, гирорамой и др.) или астростабилизаторами, а также сочетанием этих средств. Для интегрирования основного уравнения используются гироскопические, электромеханические и др. интеграторы. Инерциальная навигационная система содержит построитель (инерциальная вертикаль) или вычислитель направления вертикали места. Инерциальная вертикаль является высокоточной вертикалью и не возмущается (не отклоняется от вертикали места) при наличии горизонтальных ускорений.
Инерциальная навигационная система различают по ряду признаков: по ориентации направлений осей чувствительности инерциальных измерителей (с произвольной ориентацией, с ориентацией по звёздам, по осям, жестко связанным с объектом, с неизменной ориентацией относительно небесного тела, например Земли, с горизонтальной ориентацией и др.); по способу построения вертикали места (с аналитической, или расчётной, вертикалью, с инерциальным построителем вертикали); по наличию стабилизированной платформы (со стабилизированной гироскопической или астроплатформой, бесплатформенные) и др.
Инерциальная навигационная система весьма сложны, дорогостоящи. Срок службы их меньше, чем у обычных гироскопических приборов. Для правильного функционирования Инерциальная навигационная система перед стартом объекта требуется ввести начальные данные по координатам пункта старта и скорости, произвести ориентирование инерциальных измерителей. Точность некорректируемых Инерциальная навигационная система зависит от времени. Поэтому возможность получения информации от Инерциальная навигационная система, удовлетворяющей заданным требованиям, ограничена во времени. Так, за час полёта лучшие образцы Инерциальная навигационная система имеют погрешность в определении координат примерно 1,5—5 км. Для уменьшения погрешностей и расширения возможностей использования применяют различные способы коррекции от радионавигационных, радиолокационных и астронавигационных средств.
Лит.: Принципы инерциальной навигации, пер. с англ., под ред. В. А. Боднера, М., 1965; Помыкаев И. И., Инерциальный метод измерения параметров движения летательных аппаратов, М., 1969.
И. И. Помыкаев.
|
Так же Вы можете узнать о... Кадис (Cadiz) город и важный порт на юго-западе Испании в Андалусии на берегу ского залива Атлантического океана. Капица Петр Леонидович [р. 26.6(8.7).1894, Кронштадт], советский физик, академик (1939; член-корреспондент 1929), член Президиума АН СССР (с 1957), Герой Социалистического Труда (1945). Кафаров Петр Иванович (в монашестве — Палладий) [17(29). Кирилл Туровский (предположительно 1130-е гг. Кокчетав, город, центр ской области Казахской ССР. Константинов Александр Павлович [9(21).11.1895 — 17. Кота (племя в Индии) Кота, малочисленное племя (около 1 тыс. человек) в Индии. Крофта Камиль Крофта (Krofta) Камиль (17.7.1876, Пльзень, — 16. Кушинг Харви Уильямс Кушинг (Cushing) Харви Уильямс (8.4.1869, Кливленд, — 7. Леда, в древне-греческой мифологии супруга спартанского царя Тиндарея. Линц (Linz), город в Австрии, на Дунае. Административный центр провинции Верхняя Австрия. Лысые Горы, посёлок городского типа, центр Лысогорского района Саратовской области РСФСР. Малые выпи, волчки (lxobrychus), род птиц семейства цапель. Матча (горный узел) Матча, горный узел в системе Памиро-Алая (Таджикская ССР). Местообитание, участок суши или водоёма, занятый организмом, группой особей одного вида, биоценозом или синузией и обладающий всеми необходимыми для их существования условиями (климат, рельеф, почва, пища и др. Михай Храбрый (Mihai Viteazuļ) (1558 — 9. Морхауза комета, яркая комета, открытая американским студентом Д. |
|