Кинематика
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| КИА |
| КИБ |
| КИВ |
| КИГ |
| КИД |
| КИЕ |
| КИЖ |
| КИЗ |
| КИИ |
| КИЙ |
| КИК |
| КИЛ |
| КИМ |
| КИН |
| КИО |
| КИП |
| КИР |
| КИС |
| КИТ |
| КИУ |
| КИФ |
| КИЦ |
| КИЧ |
| КИШ |
| КИЯ |
Кинематика (от греч. kínema, родительный падеж kinematos — движение), раздел механики, посвященный изучению геометрических свойств движений без учета их масс и действующих на них сил. Излагаемое ниже относится к Кинематика движений, рассматриваемых в классической механике (движение макроскопических тел со скоростями, малыми по сравнению со скоростью света). О Кинематика движений со скоростями, близкими к скоростям света, см. Относительности теория, а о движениях микрочастиц — Квантовая механика.
Устанавливаемые в Кинематика методы и зависимости используются при кинематических исследованиях движений, в частности при расчётах передач движений в различных механизмах, машинах и др., а также при решении задач динамики. В зависимости от свойств изучаемого объекта Кинематика разделяют на Кинематика точки, Кинематика твёрдого тела и Кинематика непрерывной изменяемой среды (деформируемого тела, жидкости, газа).
Движение любого объекта в Кинематика изучают по отношению к некоторому телу (тело отсчёта); с ним связывают так называемую систему отсчёта (оси х, у, z на рис. 1), с помощью которой определяют положение движущегося объекта относительно тела отсчёта в разные моменты времени. Выбор системы отсчёта в Кинематика произволен и зависит от целей исследования. Например, при изучении движения колеса вагона по отношению к рельсу систему отсчёта связывают с землёй, а при изучении движения того же колеса по отношению к кузову вагона — с кузовом и т.д. Движение рассматриваемого объекта считается заданным (известным), если известны уравнения, называемые уравнениями движения (или графики, таблицы), позволяющие определить положение этого объекта по отношению к системе отсчёта в любой момент времени.
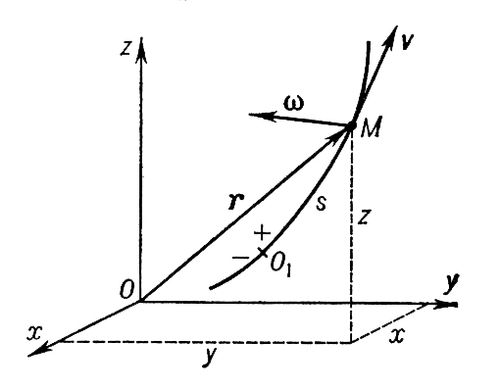
Рис. 1 к ст. Кинематика.
Основная задача Кинематика заключается в установлении (при помощи тех или иных математических методов) способов задания движения точек или тел и в определении по уравнениям их движений соответствующих кинематических характеристик движения, таких, как траектории, скорости и ускорения движущихся точек, угловые скорости и угловые ускорения вращающихся тел и др. Для задания движения точки пользуются одним из 3 способов: естественным, координатным или векторным:
а) естественный (или траекторный), применяемый, когда известна траектория точки по отношению к выбранной системе отсчёта. Положение, точки определяется расстоянием s = O1M от выбранного на траектории начала отсчёта O1, измеренным вдоль дуги траектории и взятым с соответствующим знаком (рис. 1), а закон движения даётся уравнением s = f (t), выражающим зависимость s от времени t. Например, если задано, что s = 3t2—1, то в начальный момент времени t0 = 0, S0 = —1 м (точка находится слева от начала О на расстоянии 1 м), в момент t1= 1 сек,S1 = 2 м (точка справа от O1 на расстоянии 2 м) и т.д. Зависимость s от t может быть также задана графиком движения, на котором в выбранном масштабе отложены вдоль оси t время, а вдоль оси s — расстояние (рис. 2), или таблицей, где в одном столбце даются значения t, а в другом соответствующие им значения s (подобный способ применяется, например, в железнодорожном расписании движения поезда).
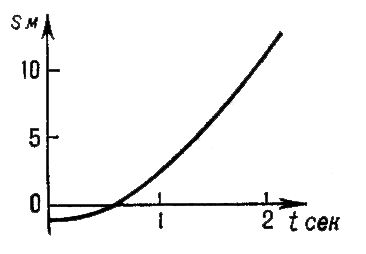
Рис. 2 к ст. Кинематика.
б) Координатный, при котором положение точки относительно системы отсчёта определяется какими-нибудь тремя координатами, например прямоугольными декартовыми х, у, z, а закон движения задаётся 3 уравнениями х = f1(t), у = f2(t), z = f3(t). Исключив из этих уравнений время t, можно найти траекторию точки.
в) Векторный, при котором положение точки по отношению к системе отсчёта определяется её радиус-вектором r, проведённым от начала отсчёта до движущейся точки, а закон движения даётся векторным уравнением r= r (t). Траектория точки — годограф вектора r.
Основными кинематическими характеристиками движущейся точки являются её скорость и ускорение, значения которых определяются по уравнениям движения через первые и вторые производные по времени от s или от х, у, z, или от r (см. Скорость, Ускорение).
Способы задания движения твёрдого тела зависят от вида, а число уравнений движения — от числа степеней свободы тела (см. Степеней свободы число). Простейшими являются поступательное движение и вращательное движение твёрдого тела. При поступательном движении все точки тела движутся одинаково, и его движение задаётся и изучается так же, как движение одной точки. При вращательном движении вокруг неподвижной оси z (рис. 3) тело имеет одну степень свободы; его положение определяется углом поворота j, а закон движения задаётся уравнением j = f (t). Основными кинематическими характеристиками являются угловая скорость w=dj/dt и угловое ускорение e = dw/dt тела. Величины w и e изображаются в виде векторов, направленных вдоль оси вращения. Зная w и e, можно определить скорость и ускорение любой точки тела.
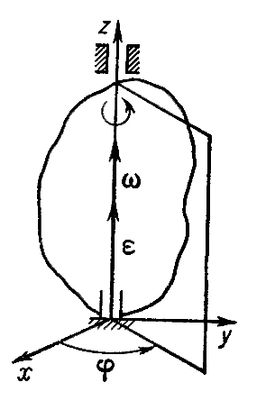
Рис. 3 к ст. Кинематика.
Более сложным является движение тела, имеющего одну неподвижную точку и обладающего 3 степенями свободы (например, гироскоп, или волчок). Положение тела относительно системы отсчёта определяется в этом случае какими-нибудь 3 углами (например, Эйлера углами: углами прецессии, нутации и собственного вращения), а закон движения — уравнениями, выражающими зависимость этих углов от времени. Основными кинематическими характеристиками являются мгновенная угловая скорость w и мгновенное угловое ускорение e тела. Движение тела слагается из серии элементарных поворотов вокруг непрерывно меняющих своё направление мгновенных осей вращения ОР, проходящих через неподвижную точку О (рис. 4).
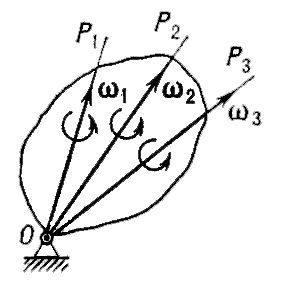
Рис. 4 к ст. Кинематика.
Самым общим случаем является движение свободного твёрдого тела, имеющего 6 степеней свободы. Положение тела определяется 3 координатами одной из его точек, называемых полюсом (в задачах динамики за полюс принимается центр тяжести тела), и 3 углами, выбираемыми так же, как для тела с неподвижной точкой; закон движения тела задаётся 6 уравнениями, выражающими зависимости названных координат и углов от времени. Движение тела слагается из поступательного вместе с полюсом и вращательного вокруг этого полюса, как вокруг неподвижной точки. Таким, например, является движение в воздухе артиллерийского снаряда или самолета, совершающего фигуры высшего пилотажа, движение небесных тел и др. Основными кинематическими характеристиками являются скорость и ускорение поступательной части движения, равные скорости и ускорению полюса, и угловая скорость и угловое ускорение вращения тела вокруг полюса. Все эти характеристики (как и кинематические характеристики для тела с неподвижной точкой) вычисляются по уравнениям движения; зная эти характеристики, можно определить скорость и ускорение любой точки тела. Частным случаем рассмотренного движения является плосконаправленное (или плоское) движение твёрдого тела, при котором все его точки движутся параллельно некоторой плоскости. Подобное движение совершают звенья многих механизмов и машин.
В Кинематика изучают также сложное движение точек или тел, то есть движение, рассматриваемое одновременно по отношению к двум (и более) взаимно перемещающимся системам отсчета. При этом одну из систем отсчета рассматривают как основную (ее еще называют условно неподвижной), а перемещающуюся по отношению к ней систему отсчёта называют подвижной; в общем случае подвижных систем отсчёта может быть несколько.
При изучении сложного движения точки её движение, а также скорость и ускорение по отношению к основной системе отсчёта называют условно абсолютными, а по отношению к подвижной системе — относительными. Движение самой подвижной системы отсчёта и всех неизменно связанных с ней точек пространства по отношению к основной системе называют переносным движением, а скорость и ускорение той точки подвижной системы отсчёта, с которой в данный момент совпадает движущаяся точка, называют переносной скоростью и переносным ускорением. Например, если основную систему отсчета связать с берегом, а подвижную с пароходом, идущим по реке, и рассмотреть качение шарика по палубе парохода (считая шарик точкой), то скорость и ускорение шарика по отношению к палубе будут относительными, а по отношению к берегу — абсолютными; скорость же и ускорение той точки палубы, которой в данный момент касается шарик, будут для него переносными. Аналогичная терминология используется и при изучении сложного движения твёрдого тела.
Основные задачи Кинематика сложного движения заключаются в установлении зависимостей между кинематическими характеристиками абсолютного и относительного движений точки (или тела) и характеристиками движения подвижной системы отсчета, то есть переносного движения. Для точки эти зависимости являются следующими: абсолютная скорость точки равна геометрической сумме относительной и переносной скоростей, т. е. na=noтн+nпер,
а абсолютное ускорение точки равно геометрической сумме трёх ускорений — относительного, переносного и поворотного, или кориолисова (см. Кориолиса ускорение), т. е. wa = woтн+wпер+wkop.
Для твердого тела, когда все составные (то есть относительные и переносные) движения являются поступательными, абсолютное движение также является поступательным со скоростью, равной геометрической сумме скоростей составных движений. Если составные движения тела являются вращательными вокруг осей, пересекающихся в одной точке (как, например, у гироскопа), то результирующее движение также является вращательным вокруг этой точки с мгновенной угловой скоростью, равной геометрической сумме угловых скоростей составных движений. Если же составными движениями тела являются и поступательные, и вращательные, то результирующее движение в общем случае будет слагаться из серии мгновенных винтовых движений (см. Винтовое движение).
В Кинематика непрерывной среды устанавливаются способы задания движения этой среды, рассматривается общая теория деформаций и определяются так называемые уравнения неразрывности, отражающие условия непрерывности среды.
Лит. см. при ст. Механика.
С. М. Тарг.
|
Так же Вы можете узнать о... Суперпозиционная карта, просветная карта, носитель информации при информационном поиске, представляющий собой прямоугольник из тонкого (0,18 мм) картона (плотной бумаги) форматом 148 x 210, 210 х 297 или 297 x 420 мм; иногда в качестве С. Телевизионная антенна ,антенна для передачи или приёма сигналов телевизионных вещательных программ — радиосигналов телевизионного изображения и его звукового сопровождения. Тонно-миля, единица измерения транспортной работы морского судна. Тырновское царство, феодальное государство 2-й половины 14 в. Уш-Бельдир, бальнеологический курорт на юго-востоке Тувинской АССР. Фокс Чарлз Джеймс Фокс (Fox) Чарлз Джеймс (24.1.1749, Лондон, – 13. Хассель Одд Хассель (Hassel) Одд (р. 17.5.1897, Осло), норвежский физико-химик, член Норвежской АН в Осло (1933). Целестин (от лат. caelestis — небесный), минерал класса сульфатов состава SrSO4; обычны примеси Ca и Ba. Чешский язык, язык чехов. Наряду со словацким языком является одним из государственных языков ЧССР. Шичжайшань, могильник эпохи бронзы и раннего железа (4 в. Эктомезенхима (от экто... и мезенхима), часть зародышевой соединительной ткани (мезенхимы) большинства многоклеточных животных и человека. Южно-Сандвичев жёлоб, глубоководный жёлоб в южной части Атлантического океана. Авторитарные теории, антидемократические течения политической мысли, в основе которых лежит идея обоснования авторитарных, тоталитарных режимов — всевластия диктата одного лица или элиты в государстве, абсолютной бесконтрольности государственной власти, политического бесправия личности и народа, отсутствия демократической процедуры свободного волеизъявления. Альберт I (Albert) (8.4.1875 — 17.2. 1934), бельгийский король с 1909. Апперцепция (от лат. ad — к и perceptio — восприятие), одно из фундаментальных свойств психики человека, выражающееся в обусловленности восприятия предметов и явлений внешнего мира и осознания этого восприятия особенностями общего содержания психической жизни как целого, запасом знаний и конкретным состоянием личности. Ацетаты, соли и эфиры уксусной кислоты. Соли — кристаллические продукты, большинство из них хорошо растворимо в воде; многие находят разнообразное применение. Башкаус, река на Алтае, в Горно-Алтайском АО, левый приток р. Бирон Эрнст Иоганн [23.11(3.12).1690, Курляндия, — 17(28). Бриенн (Brienne), город во Франции (департамент Об), в районе которого 17(29) января 1814 армия Наполеона I (около 36 тыс. |
|