Поисковая система
Большая Советская Энциклопедия. Статьи для написания рефератов, курсовых работ, научные статьи, биографии, очерки, аннотации, описания.
|
|
| ПОА |
| ПОБ |
| ПОВ |
| ПОГ |
| ПОД |
| ПОЕ |
| ПОЖ |
| ПОЗ |
| ПОИ |
| ПОЙ |
| ПОК |
| ПОЛ |
| ПОМ |
| ПОН |
| ПОО |
| ПОП |
| ПОР |
| ПОС |
| ПОТ |
| ПОУ |
| ПОХ |
| ПОЦ |
| ПОЧ |
| ПОШ |
| ПОЭ |
| ПОЯ |
Поисковая система управления, система автоматического управления, в которой управляющие воздействия методом поиска автоматически изменяются т. о., чтобы осуществлялось наилучшее (в каком-то смысле) управление объектом; при этом характеристики объекта или внешние возмущения могут изменяться неизвестным заранее образом. Принцип автоматического поиска лежит в основе действия самоприспосабливающихся систем. Поисковая система существенно отличаются от следящих систем и систем стабилизации без поиска (в т. ч. систем программного регулирования), в которых устраняется до допустимых пределов рассогласование между заданными значениями регулируемых параметров и их текущими или средними значениями путём воздействия на управляющие переменные x (t), зависящего от этого рассогласования; при этом требуется, чтобы отношение выходных параметров y (t) объекта управления к его входным параметрам x (t) не меняло знак:  const. (1)
const. (1)
 t) — управляющее воздействие;
t) — управляющее воздействие;  (t) — внешние возмущения;
(t) — внешние возмущения;  (t) — выходной параметр;
(t) — выходной параметр;  (t) — корректирующее воздействие;
(t) — корректирующее воздействие;  (t) — показателъ цели управления (функционал);
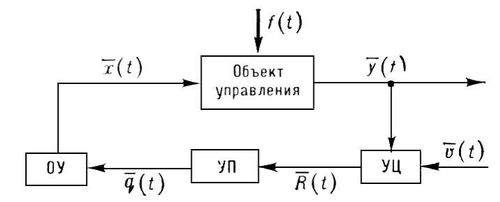
(t) — показателъ цели управления (функционал);  (t) — командные сигналы. Поисковая система." alt="Структурная схема поисковой системы управления: ОУ — органы управления; УП — устройство организации поиска; УЦ — устройство формирования цели управления;
(t) — командные сигналы. Поисковая система." alt="Структурная схема поисковой системы управления: ОУ — органы управления; УП — устройство организации поиска; УЦ — устройство формирования цели управления; Структурная схема поисковой системы управления: ОУ — органы управления; УП — устройство организации поиска; УЦ — устройство формирования цели управления;  t) — управляющее воздействие;
t) — управляющее воздействие;  (t) — внешние возмущения;
(t) — внешние возмущения;  (t) — выходной параметр;
(t) — выходной параметр;  (t) — корректирующее воздействие;
(t) — корректирующее воздействие;  (t) — показателъ цели управления (функционал);
(t) — показателъ цели управления (функционал);  (t) — командные сигналы.
(t) — командные сигналы.
Однако для множества различных объектов, технологических и др. процессов типично то, что их статические и динамические характеристики могут изменяться произвольно. Таковы, например, полёт самолёта, процессы горения, многие химические реакции и др. При этом часто, наряду с нарушением условия (1), между целевыми функциями (характеризующими цель управления) и входным воздействием имеется статическая взаимосвязь экстремального вида. В таких системах количество начальной информации об объекте недостаточно для достижения цели управления. Естественный путь восполнения недостающей информации — определение её в процессе работы.
Структурная схема Поисковая система показана на рис. Состояние объекта управления определяется управляющими воздействиями  = [x1(t),..., xm (t)], внешними возмущениями
= [x1(t),..., xm (t)], внешними возмущениями  = [f1(t),..., fk (t)] и выходными параметрами
= [f1(t),..., fk (t)] и выходными параметрами  = [y1(t), …, yn (t)]. В Поисковая система входят: устройство формирования цели управления (УЦ), устройство организации поиска (УП) и органы управления (ОУ). УЦ состоит из измерительного и вычислительного устройств и по показателям состояния объекта вырабатывает показатель цели управления
= [y1(t), …, yn (t)]. В Поисковая система входят: устройство формирования цели управления (УЦ), устройство организации поиска (УП) и органы управления (ОУ). УЦ состоит из измерительного и вычислительного устройств и по показателям состояния объекта вырабатывает показатель цели управления  [x (t)]. Функционал
[x (t)]. Функционал  [x (t)] может изменяться и перенастраиваться в зависимости от переменных
[x (t)] может изменяться и перенастраиваться в зависимости от переменных  = [u1(t), …, ui (t)]. УП включает устройства логического действия и зависимости от изменения
= [u1(t), …, ui (t)]. УП включает устройства логического действия и зависимости от изменения  [x (t)]; оно вырабатывает командные сигналы
[x (t)]; оно вырабатывает командные сигналы  , необходимые для приближения системы к заданному значению показателя цели управления.
, необходимые для приближения системы к заданному значению показателя цели управления.
Поиск осуществляется следующим образом: на вход объекта подаются пробные воздействия и оценивается реакция на них объекта, проявляющаяся в виде изменения значения целевой функции  (t); далее в УП определяются те воздействия, которые изменят показатель цели в нужную сторону; вслед за этим вырабатываются и подаются на вход объекта соответствующие сигналы, т. е. прикладываются рабочие воздействия. Затем на объект управления снова подаются поисковые воздействия и цикл повторяется.
(t); далее в УП определяются те воздействия, которые изменят показатель цели в нужную сторону; вслед за этим вырабатываются и подаются на вход объекта соответствующие сигналы, т. е. прикладываются рабочие воздействия. Затем на объект управления снова подаются поисковые воздействия и цикл повторяется.
Наиболее распространённые методы поиска: метод Гаусса — Зейделя, при котором последовательно отыскивается экстремум выхода по 1-й, 2-й,..., m-й координате входного воздействия; метод градиента, состоящий в том, что новое входное воздействие получается из предыдущего в результате движения системы по градиенту выходного функционала; метод случайного поиска, при котором используются пробные смещения в случайных направлениях; метод стохастической аппроксимации, состоящий в последовательном приближении к экстремуму с учётом результатов предыдущих поисковых шагов, с постепенным уменьшением размера шага.
В первых Поисковая система требовалось отыскивать и поддерживать управляющие воздействия, обеспечивающие наибольшие или наименьшие (экстремальные) значения целевой функции (например, наибольшую дальность полёта самолёта, наибольший кпд устройства, наибольшую температуру в топке, наименьшую стоимость продукции и т.д.). Такие Поисковая система называются системами экстремального регулирования (СЭР) или экстремальными системами. Идея экстремального регулирования как нового направления в развитии систем автоматического управления впервые была выдвинута в СССР (В. В. Казакевич, 1944). Главное преимущество экстремальных систем состоит в том, что они не требуют значительной начальной информации об управляемом объекте, а также высокой точности измерительной аппаратуры, дающей текущую информацию об объекте, — эта аппаратура должна лишь иметь чувствительность, достаточную для характеристики тенденции (направления) изменения контролируемых параметров.
Часто Поисковая система используется совместно с моделью объекта (см. Моделирование). В этом случае оптимальное значения параметров объекта выбираются методом поиска не на самом объекте, а на его модели. Затем значения этих параметров устанавливаются на объекте. Подобные системы применяют, например, для автоматического управления самолётом (автопилот).
Поисковая система применяют также для стабилизации регулируемого параметра. Это необходимо в том случае, когда нарушается условие (1). При этом целевая функция может иметь вид  или
или  ,
,
( — заданное значение выходного параметра), причём Поисковая система должна отыскивать минимум
— заданное значение выходного параметра), причём Поисковая система должна отыскивать минимум  (t).
(t).
Лит.: Казакевич В. В., Об экстремальном регулировании, в сборнике: Автоматическое управление и вычислительная техника, в. 6, М., 1964; Фельдбаум А. А., Вычислительные устройства в автоматических системах, М,, 1959; Красовский А. А., Динамика непрерывных самонастраивающнхся систем, М., 1963; Первозванский А. А., Поиск, М., 1970; Растригин Л. А., Системы экстремального управления, М., 1974.
В. В. Казакевич.
|
Так же Вы можете узнать о... Торндайк Эдуард Ли Торндайк (Thorndike) Эдуард Ли (31.8.1874, Уильямсберг, штат Массачусетс, — 9. Усть-Уда, посёлок городского типа, центр Усть-Удинского района Иркутской области РСФСР, на правом берегу Ангары, в 109 км к северо-востоку от ж. Хаваст (до 1963 — Урсатьевская), посёлок городского типа в Сырдарьинской области Узбекской ССР, подчинён Янгиерскому горсовету. Чабукиани Вахтанг Михайлович [р. 27.2(12.3). Штернфельд Ари Абрамович (р. 14.5. 1905, Серадз, Польша), советский учёный, один из пионеров космонавтики, доктор технических наук honoris causa АН СССР (1965), заслуженный деятель науки и техники РСФСР (1965). Юровская Римма Яковлевна (р. 27.9.1898, Феодосия), один из организаторов юношеского коммунистического движения в СССР. Алмазная обработка, обработка изделий или материалов инструментами с режущей частью преимущественно из синтетических или природных алмазов. Ателектаз (от греч. ateles — неполный в ektasis — растяжение), спадение лёгочной ткани, сопровождающееся её безвоздушностью. Берзинь Рудольф [9(21).9.1881, Рига, — 26.1. Бунин Леонтий, русский гравёр конца 17 — начале 18 вв. Випратокс, жидкая мазь (линимент), содержащая яды разных змей, метилсалицилат, камфару. |
|